I’d like to share my experience with my copter (aka ZuCopter) during my first full test using AUTO mode. My quad is ArduCopter, 3DRobotics Quad-C frame using APM 2.5 Firmware 2.9.1b
The plan was to go around the house, full automated, including takeoff and landing. This was executed quite smoothly at the first run J, Then I said… let’s try that again; I relaunched the same mission without turning the copter off or resetting, and…. something didn’t go so well: the quad decided to go full throttle without following strictly the programmed waypoints. I was good to have RTL mode programmed on my radio, so I was able to recover the flight back to manual mode.
You can see the recorded video from the GoPro installed on the quad.
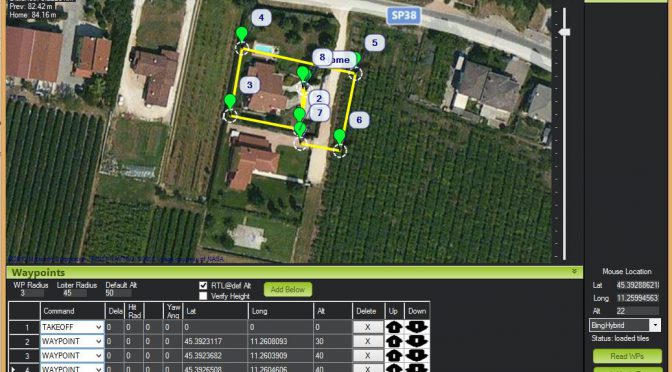
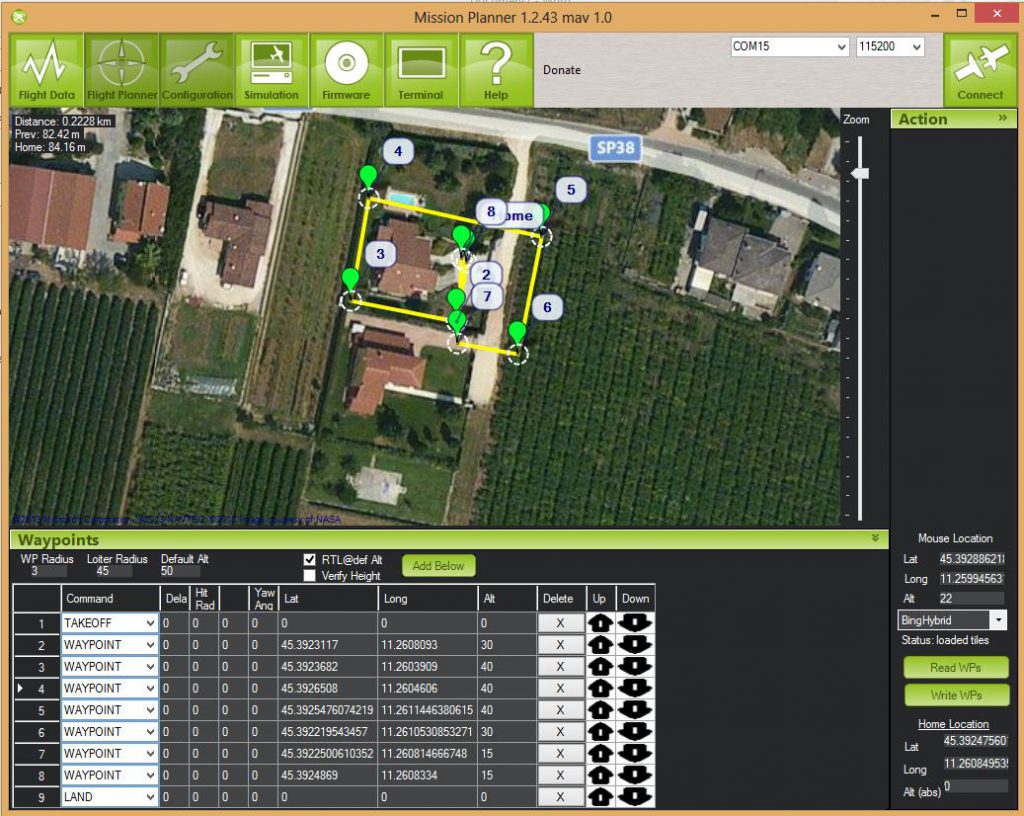
This was the original plan:
The first run was quite well done I would say. Only thing I noticed is that arducopter do not strictly reach the altitude set at the waypoint. When it reaches the waypoint, it doesn’t matter if the altitude is lower, in contibue both increasing altitude and continue to the next waypoint.
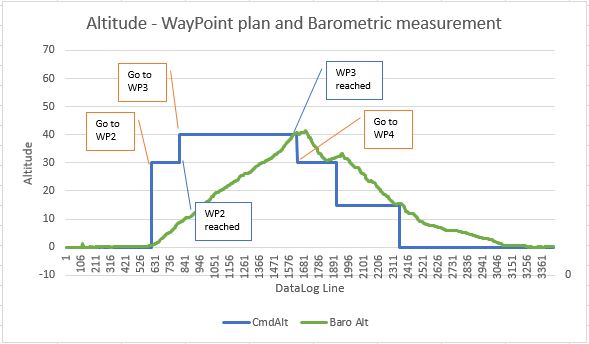
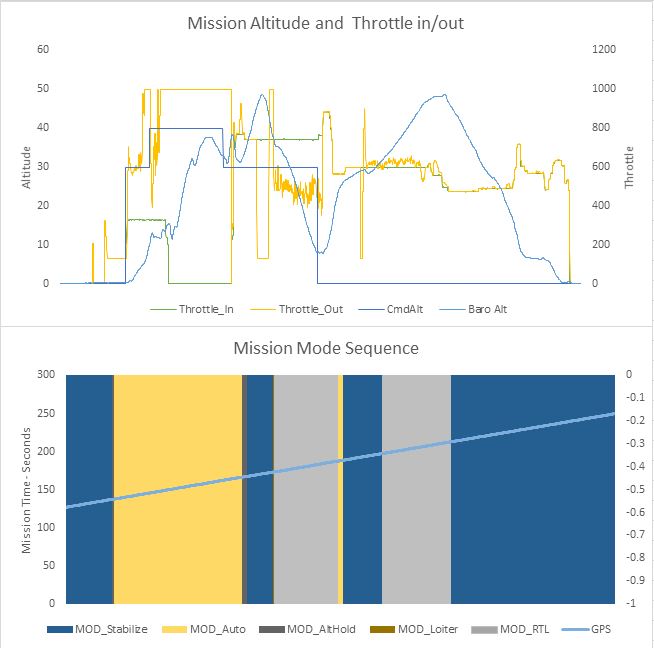
From the data extraced from the LOG, you can see the waypoint altitude was reached only after waypoint 3.
Blu data are altitude requested by WayPoint Command, and the green is the barometric measurement.
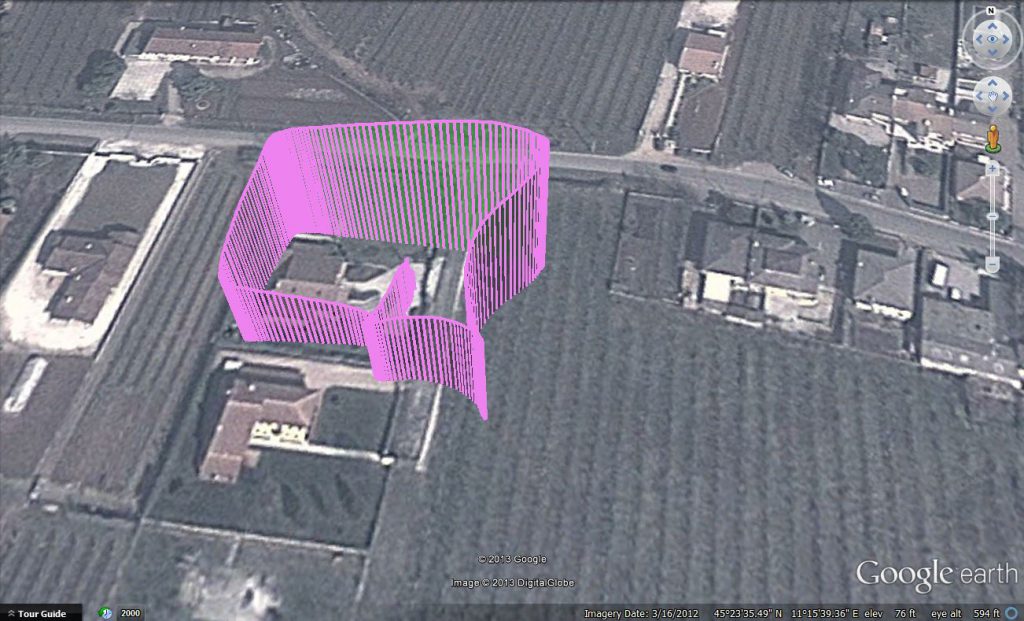
This is the first run importing the .gpx information from the arducopter datalogger to Google earth.
As for the second run, I executed it using the same mission, without changing the mission nor switching off the quad. From the video you can see the strange behaviour:
- Copter not heading straight (camera, which is the head of the copter, was instead on side)
- Throttle-out was 100% most of the time during auto.
- Waypoints were passed very large
Then I decided to engage RTL to bring the copter back home.
This was the first run from another angle:

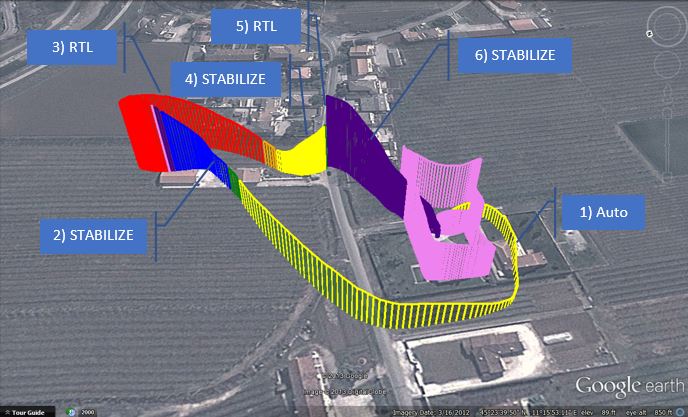
And this is the second run where you can see the different copter modes I set. The yellow below was the original AUTO mode, blue STABILIZE, red RTL
As you can see from the datalogger, most of the yellow line (throttle-out) during the first part of the flight is set flat to 1000. So full motors.
The image below was merged to the mission mode sequence: yellow area is the lower graph is the AUTO MODE (graph below is gathered by importing to excel the logs and trying to align them as much as possibile to verify what happened in what mode; it is not perfect).
The last thing I do not understand, is:
- why during the RTL the altitude decreased from 50mt to 10mt and I had to switch manual again to bring it back to a correct altitude?
I am attaching my log to this just in case somebody have any idea.
Overall I had quite fan, and was pretty happy I did program the RTL mode easy to be selected from my Radio switch.
–Alberto