Ho deciso di riattivare il mio blog, con la voglia di condividere alcune piccole esperienze che sto facendo, un po’ per gioco, un po’ per esperimento e un po’ per mentene viva la passione della tecnologia che mi ha sempre accompagnato nella mia vita.
Da un breve serata al Fablab di Torino, dove Roberto Chinelli mi ha invitato a passare una serata dove Roberto Nocera presentava quello che all’epoca si chiamava Spark, ed ora Particle in breve un piccolo microchip programmabile IoT con WiFi inegrata.
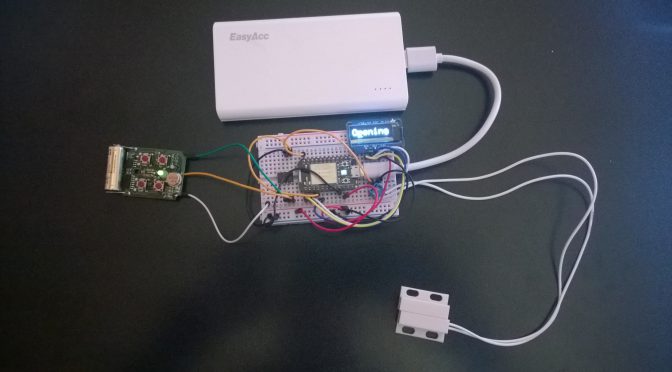
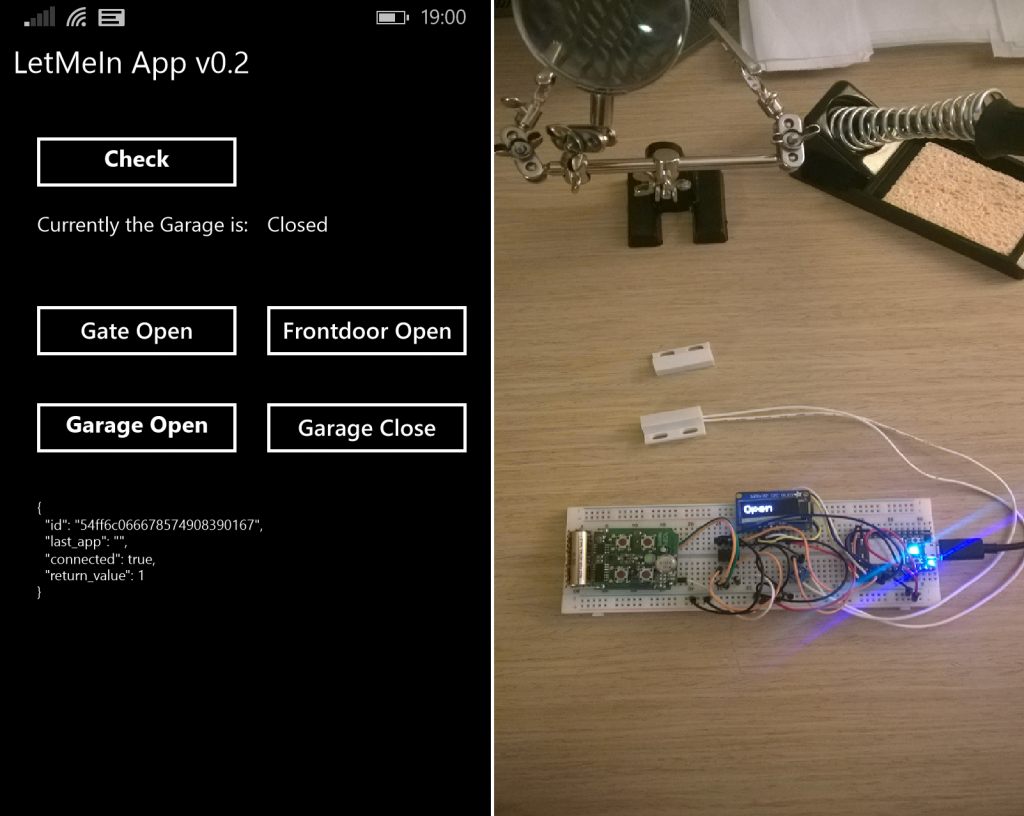
Da li, l’idea di giocare un po’ ho iniziato a creare un piccolo progettino per il controllo remoto dell’accesso al cancello e garage di casa, semplicemente per evitarmi la pigrizia di portarmi le chiavi di casa quando esco per correre ma, semplicemente avendo con me il telefono, avere la possibilità di tornare a casa.
Nei prossimi post pubblicherò alcuni riferimenti agli esperimenti fatti nello scorso annetto e mezzo, che in sintesi sono stati:
- La programmazione di base di particle
- L’interfacciamento con un display LCD per la visualizzazione messaggi
- Il controllo di relè di comando
- L’integrazione con il telecomando cancello garage
- Lo sviluppo dell’applicazione cliente su Windows UWP x Phone
- Lo sviluppo di un APP sullo smartwatch Garmin Fenix2
- L’integrazione con i servizi voce di Microsoft Cortana
- L’integrazione con il citofono promelit per il comando del cancelletto di casa.
Chissà che prima di completare tutto, non abbia ulteriormente evoluto l’applicazione, tra le prossime idee ci sarebbe quello di integrare tutto su Azure IoT… ma vedremo un po’
Stay tuned
Alberto
[update]
Articoli della serie:
- LetMeIn Project – Intro (questo)
- LetMeIn Project – Particle
- LetMeIn Project – Integrazione Display e telecomando cancello
- LetMeIn Project – UWP Mobile & Cortana