Con la nuova casa è arrivato il momento di predisporre un nuova rete dati. Le motivazioni sono diverse, ma le principali sono state le seguenti:
- I miei figli, come praticamente tutti i giovani d’oggi, vivono di rete; anche un millisecondo perso durante una partita multiplayer online ti può costare la vittoria, e se perdi è sempre colpa della rete (e quindi di tuo padre)
- Come già sperimentato nella casa precedente, ho una discreta predilezione per le automazioni, infatti ho già iniziato ad installare diversi sensori IoT per luci, prese, tapparelle, etc
- Con l’avvento del Covid19, è diventato un must poter lavorare bene a casa.
A seguito di un post su FB e Instagram, diversi amici mi hanno chiesto info rispetto a quanto ho realizzato, e qui di seguito le info.
Ubiquiti Unifi
Perchè Unifi? Semplicemente ne ho sentito parlare da Francesco Sodano in un commento ad un suo post
Annina, quando ho finito, prova a cercare il mio Wi-Fi a Milano… penso che avrai 5 tacche di segnale da casa tua.. 🙂
Su facebook commentava spiegando la sua rete di casa a Ginevra
Con questa affermazione, è svenuto mio figlio e mi ha pregato di installare i Wifi Unifi 🙂
Bill of Material
Senza troppi induci questo la lista della spesa
- Unifi Security Gateway – Un Security Gateway per controllare la rete, il traffico e fare intrusion protection
- Unifi Switch 8 – Switch 8 porte managed, con 4 porte POE per alimentare le antenne WiFi
- Unifi Nano HD – 3 Antenne Wifi da 1.7GBit (whooooa, come direbbe Ricky)
- Unikey Cloud Gen 2 – Device per il controllo della rete. Io personalmente non l’ho comprato, e ho installato il software su una RaspberryPi2 che mi avanzava per casa
Ho comprato tutti i prodotti nel solito Amazon online. Tutti arrivati ovviamente perfetti e in 1 o 2 giorni.
Lo switch è solo un 8 porte, direi proprio il minimo essenziale. Sarebbe stato meglio un 16 porte, ma vincoli di budget mi hanno portato qui per ora.
Le tre antenne sono configurate in Mesh, usano lo stesso nome WiFi e sono posizionate uno per piano: i device che si collegano possono così fare roaming e connettersi all’antenna che fornisce il segnale migliore .
L’installazione è stata abbastanza straight-forward. La gestione può essere fatta tramite Unikey Cloud Gen o il Network Controller. Inizialmente ho eseguita l’installazione del Network Controller tramite setup sul mio pc windows 10.
ATTENZIONE: i device Wifi (e tutti gli altri Unifi) non hanno un sistema di gestione interno come altri vendor (es: configurazione via web), ma serve UniKey Cloud o Network Controller!!
Successivamente ho installato il tutto su Raspberrypi2, prendendo la versione debian del Network Controller, e facendo backup e restore della configurazione.
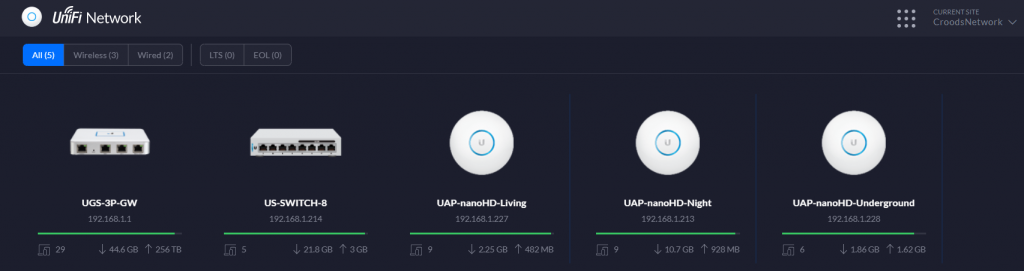
Il risultato è il seguente:


Attualmente i device sono uno per piano e, come accennato, i vari device si attaccano al wifi più vicino

Naturalmente Xbox, PS4 e Computer dei figli sono collegati direttamente via cavo alla Lan per prestazioni ottimali 🙂
Approccio
Ho inizialmente iniziato con una sola antenna, ed lo Switch PoE per alimentarla. Le antenne Nano contengono nella confezione originale anche un alimentatore esterno PoE se non si dovesse avere uno switch PoE, quindi una scelta potrebbe essere anche di acquistare la sola antenna (anche se in quel caso, forse sono meglio altri prodotti di altre marche).
Personalmente, per poter avere una vista integrata di tutti i dispositivi, della loro posizione, e una vista “managed” del traffico che passava tra la rete, ho preferito prendere anche lo switch Unifi.
Successivamente la scelta di prendere anche il Security Gateway è stata “dovuta”, sia perchè aumenta le capacità di gestione e tracking del traffico, ma soprattuto perchè consente di attuare politiche di Intrusion Detection e Protection.
Avendo infatti l’obiettivo di installare diversi componenti di domotica, mi è venuto subito il pensiero che queste singole antennine potrebbero non essere sicure, e quindi l’aggiunta di un livello di protezione in più mi è sembrata una cosa buona e giusta.
Mi rimane ancora da valutare l’impostazione di diverse virtual-lan a seconda dei tipi di dispositivi, al fine di separare e proteggere ulteriormente dispositivi IoT da dispositivi più standard di casa (tipo pc e telefoni), ma su questo ci lavorerò prossimamente
Considerazioni personali
Sono molto contento di questo setup (e ringrazione Francesco di avermi fatto conoscere Ubiquity).
Ovviamente esistono diverse altre soluzioni, che probabilmente sono più adatte a chi, magari, vuole avere una installazione più semplice e meno articolata da installare.
Personalmente, nonostante non sia la configurazione più economica, sono estremamente contento della scelta e….. prossima tappa…. le telecamere di sicurezza UniFi Protect G4 Bullet!!
(anche se per quelle, al momento, manca il budget a copertura)